學(xué)校新聞
機(jī)電工程與自動(dòng)化學(xué)院吳俊君副教授在人工智能TOP頂級(jí)期刊《EAAI》發(fā)表論文
發(fā)表時(shí)間:2022-03-20
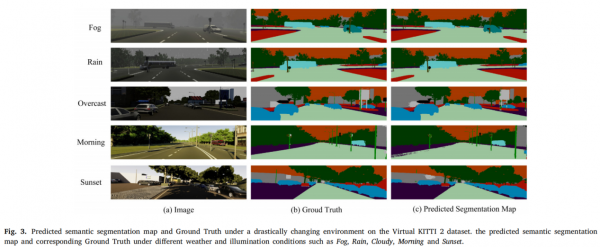
我校機(jī)電工程與自動(dòng)化學(xué)院先進(jìn)機(jī)器人技術(shù)與系統(tǒng)團(tuán)隊(duì)成員吳俊君副教授以學(xué)校為唯一署名單位在人工智能TOP頂級(jí)期刊《International Scientific Journal Engineering Applications of Artificial Intelligence (EAAI)》上發(fā)表“Learning invariant semantic representation for long-term robust visual localization”學(xué)術(shù)論文。語(yǔ)義SLAM是移動(dòng)機(jī)器人領(lǐng)域的核心技術(shù)和前沿?zé)狳c(diǎn)問(wèn)題。該成果針對(duì)室外復(fù)雜環(huán)境下移動(dòng)機(jī)器人長(zhǎng)期視覺(jué)導(dǎo)航的魯棒性定位難題,提出一種融合深度和語(yǔ)義信息的視覺(jué)定位方法,能有效克服光照、雨霧天氣和季節(jié)交替等環(huán)境的主要變化條件對(duì)場(chǎng)景語(yǔ)義表達(dá)的干擾,大幅提升機(jī)器人自主定位精度,為智能駕駛、商用清潔、戶外巡檢等多應(yīng)用領(lǐng)域的服務(wù)機(jī)器人在室外長(zhǎng)時(shí)間大范圍區(qū)域的穩(wěn)定自主導(dǎo)航提供了有價(jià)值的應(yīng)用依據(jù)。
EAAI 為人工智能領(lǐng)域top頂刊,IFAC 8本會(huì)刊之一,中科院一區(qū)。IFAC成立于1957年,是一個(gè)以國(guó)家組織為其成員的國(guó)際性學(xué)術(shù)組織。IFAC主辦包括Automatica、Control Engineering Practice、Engineering Applications of Artificial Intelligence在內(nèi)的8本會(huì)刊,其中Engineering Applications of Artificial Intelligence是智能控制技術(shù)領(lǐng)域知名的高水平期刊,致力于推廣和傳播人工智能工程應(yīng)用的創(chuàng)新研究成果。
(機(jī)電工程與自動(dòng)化學(xué)院)
郵編:528225
地址:江灣校區(qū)——廣東省佛山市禪城區(qū)江灣一路18號(hào)
仙溪校區(qū)——廣東省佛山市南海區(qū)獅山鎮(zhèn)廣云路33號(hào)
河濱校區(qū)——廣東省佛山市禪城區(qū)河濱路5號(hào)
相關(guān)鏈接
關(guān)注我們 (歡迎投稿)

佛大官微
二維碼.jpg)
logo.png)
佛大視頻號(hào)
二維碼.png)
logo.png)
佛大南方號(hào)
二維碼.png)
習(xí)中心.jpg)
佛大強(qiáng)國(guó)號(hào)
習(xí)強(qiáng)國(guó).jpg)

佛大黨建

ogo.jpg)
佛大易班


佛大青年

Copyright 佛山大學(xué) 2024 . All Rights Reserved.
新版網(wǎng)站試運(yùn)行中,如您發(fā)現(xiàn)問(wèn)題請(qǐng)聯(lián)系我們[email protected],感謝您的關(guān)注!